ARDUİNO TABANLI
HEDEF TESPİT RADAR SİSTEMİ

Daha önceki raporumuzdan da hatırlayacağımız gibi yapacağımız proje Arduino tabanlı radar sistemimizi anlatacağız. Yapacağımız projenin fonksiyonlarında standart hareketler bulunduğu gibi, maketimizin önüne yerleştireceğimiz ultrasonik mesafe sensörünün yardımıyla da çevredeki hava tehditlerine karşı komuta üssümüzün korunmasını sağlayacağız.
Proje Safhaları
1- Proje taslağının fusion-360 programında çizilmesi.
2- Malzeme temini.
3- Elektronik malzemelerin plakete lehimlenmesi.
4- Komuta binasının, kulelerin ve diğer yapı maketlerinin oluşturulması.
5- Arduino kodlarının sıfırdan oluşturulması ve işlemciye atanması.
6- Aydınlatma ledlerinin kulelere ve komuta binasına montajı.
7- Projenin fizibilite çalışmalarının tamamlanması ve test aşamalarına geçilmesi.
8- Simülasyon programının yazılım ile entegresi.
9- Maket’e arduino, plaket ve binaların montajının yapılması.
10- Proje’ye son halini vermek için kamuflajın yapılması ve helikopter pistinin entegre edilmesi.
1-Projenin taslak kısmı Fusion360 programı vasıtasıyla detaylı şekilde çizilmiştir. Her ayrıntı göz önünde bulundurulacak şekilde projemizin mimari aşaması tamamlanmıştır.


2- Gerekli malzeme temininin ardından hangi unsurun hangi bölgeye yerleştirileceğini kararlaştırdık. Ardından tüm elemanları geçici olarak maket üzerine yerleştirdik.










3- Elektronik parçaların lehimleme işlemini gerçekleştirdik. Elemanları birbirine monteledik.




4-Komuta binasının, kulelerin ve diğer unsurların maketleri oluşturuldu. Yerlerine monte edildi.





5- Gerekli yazılım kodlarının sıfırdan oluşturulma aşaması ve kodlama işleminin süreci.
 6- Aydınlatma ledlerinin kulelere ve komuta binasına montajını gerçekleştirdik. kulelere beyaz led kullanırken komuta binasının etrafına sarı led kullanıldı. Arduinonun ikaz lambası ise kırmızı renktedir.
6- Aydınlatma ledlerinin kulelere ve komuta binasına montajını gerçekleştirdik. kulelere beyaz led kullanırken komuta binasının etrafına sarı led kullanıldı. Arduinonun ikaz lambası ise kırmızı renktedir.
7- Projenin alt yapısı tamamlandıktan sonra deneme ve test aşamalarına başladık projemizin çalışıp çalışmadığını kontrol ettik.
Projemiz sorunsuz bir şekilde çalışmıştır.


8- Processing vasıtasıyla arduino, ultrasonik sensör ve servodan aldığı verileri simülasyon ekranında görmekte.Simülasyonu radara entegre ederek birlikte çalışmasını sağladık.
9- Makete son halini vermek için kamuflajın maketlere yapıştırılması plaketin ve arduinonun montajının yapılması sağlanmıştır.Askeri kamuflajı tercih etmemizin sebebi proje amacının askeri üs bölge korumalarının simülasyonunu gerçekleştirmesidir.


10- Son aşama helikopter pistinin oluşturulması, askeri personel ve araçlarının maketlerinin yerleştirilmesiyle proje tamamlanmıştır.
Proje tamamen bittikten sonra test aşamalarına geçtik ve projemizin düzgün çalışıp çalışmadığını kontrol ettik. Projemizin sorunsuz bir şekilde çalıştığını gördükten sonra video çekim aşamalarına geçtik. Şimdi projede kullandığımız herşeyi detaylı bir şekilde inceleyelim.
KULLANDIĞIMIZ PARÇALAR(MODÜLLER)
ARDUİNO UNO R3
Arduino Uno ATmega328 mikrodenetleyici içeren bir Arduino kartıdır. Arduino ‘nun en yaygın kullanılan kartı olduğu söylenebilir. Arduino Uno ‘nun ilk modelinden sonra Arduino Uno R2, Arduino Uno SMD ve son olarak Arduino Uno R3 çıkmıştır. Arduino ‘nun kardeş markası olan Genuino markasını taşıyan Genuino Uno kartı ile tamamen aynı özelliklere sahiptir. Arduino Uno ‘nun 14 tane dijital giriş / çıkış pini vardır. Bunlardan 6 tanesi PWM çıkışı olarak kullanılabilir. Ayrıca 6 adet analog girişi, bir adet 16 MHz kristal osilatörü, USB bağlantısı, power jakı (2.1mm), ICSP başlığı ve reset butonu bulunmaktadır. Arduino Uno bir mikrodenetleyiciyi desteklemek için gerekli bileşenlerin hepsini içerir. Arduino Uno ‘yu bir bilgisayara bağlayarak, bir adaptör ile ya da pil ile çalıştırabilirsiniz.
Aşağıdaki resimde Arduino Uno R3 ‘ün kısımları gösterilmektedir.
1 : USB jakı
2 : Power jakı (7-12 V DC)
3 : Mikrodenetleyici ATmega328
4 : Haberleşme çipi
5 : 16 MHz kristal
6 : Reset butonu
7 : Power ledi
8 : TX / NX ledleri
9 : Led
10 : Power pinleri
11 : Analog girişler
12 : TX / RX pinleri
13 : Dijital giriş / çıkış pinleri (yanında ~ işareti olan pinler PWM çıkışı olarak kullanılabilir.)
14 : Ground ve AREF pinleri
15 : ATmega328 için ICSP
16 : USB arayüzü için ICSP
GÜÇ
Arduino Uno bir USB kablosu ile bilgisayar bağlanarak çalıştırılabilir ya da harici bir güç kaynağından beslenebilir. Harici güç kaynağı bir AC-DC adaptör ya da bir pil / batarya olabilir. Adaptörün 2.1 mm jaklı ucunun merkezi pozitif olmalıdır ve Arduino Uno ‘nun power girişine takılmalıdır. Pil veya bataryanın uçları ise power konnektörünün GND ve Vin pinlerine bağlanmalıdır.
VIN : Arduino Uno kartına harici bir güç kaynağı bağlandığında kullanılan voltaj girişidir.
5V : Bu pin Arduino kartındaki regülatörden 5 V çıkış sağlar. Kart DC power jakından (2 numaralı kısım) 7-12 V adaptör ile, USB jakından (1 numaralı kısım) 5 V ile ya da VIN pininden 7-12 V ile beslenebilir. 5V ve 3.3V pininden voltaj beslemesi regülatörü bertaraf eder ve karta zarar verir.
3.3V : Arduino kart üzerindeki regülatörden sağlanan 3,3V çıkışıdır. Maksimum 50 mA dir.
GND: Toprak pinidir.
IOREF : Arduino kartlar üzerindeki bu pin, mikrodenetleyicinin çalıştığı voltaj referansını sağlar. Uygun yapılandırılmış bir shield IOREF pin voltajını okuyabilir ve uygun güç kaynaklarını seçebilir ya da 3.3 V ve 5 V ile çalışmak için çıkışlarında gerilim dönüştürücülerini etkinleştirebilir.
GİRİŞ VE ÇIKIŞLAR
Arduino Uno ‘da bulunan 14 tane dijital giriş / çıkış pininin tamamı, pinMode(), digitalWrite() ve digitalRead() fonksiyonları ile giriş ya da çıkış olarak kullanılabilir. Bu pinler 5 V ile çalışır. Her pin maksimum 40 mA çekebilir ya da sağlayabilir ve 20-50 KOhm dahili pull – up dirençleri vardır. Ayrıca bazı pinlerin özel fonksiyonları vardır:
Serial 0 (RX) ve 1 (TX) : Bu pinler TTL seri data almak (receive – RX) ve yaymak (transmit – TX) içindir.
Harici kesmeler (2 ve 3) : Bu pinler bir kesmeyi tetiklemek için kullanılabilir.
PWM: 3, 5, 6, 9, 10, ve 11 : Bu pinler analogWrite () fonksiyonu ile 8-bit PWM sinyali sağlar.
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) : Bu pinler SPI kütüphanesi ile SPI haberleşmeyi sağlar.
LED 13 : Dijital pin 13 e bağlı bir leddir. Pinin değeri High olduğunda yanar, Low olduğunda söner.Arduino Uno ‘nun A0 dan A5 e kadar etiketlenmiş 6 adet analog girişi bulnur, her biri 10 bitlik çözünürlük destekler. Varsayılan ayarlarda topraktan 5 V a kadar ölçerler. Ancak, AREF pini ve analogReference() fonksiyonu kullanılarak üst limit ayarlanabilir.
TWI : A4 ya da SDA pini ve A5 ya da SCL pini Wire kütüphanesini kullanarak TWI haberleşmesini destekler.
AREF : Analog girişler için referans voltajıdır. analogReference() fonksiyonu ile kullanılır.
RESET : Mikrodenetleyiciyi resetlemek içindir. Genellikle shield üzerine reset butonu eklemek için kullanılır.
HANGİ PİN NE İŞE YARAR ?
GND: Topraklama.
VCC: 3.3V. , 5V güç kaynağıdır.
CE: RX/TX’i etkinleştirir. Eğer (HİGH) çalışıyorsa modül veri alıyordur yada veri yolluyordur.
CSN: Eğer çip LOW olarak çalışıyorsa SPI komutlarına tepki verir. Bu aslında ‘gerçek’ haberleşecek çipi seçme sinyalidir ve alıcı-verici radyo haberleşmesini etkinleştirip / devre dışı bırakır. Genelde CE ile karıştırılır.
SCK: SPI haberleşmesinde senkronu sağlayan saat sinyalinin bulunduğu hattır. Saat sinyali master cihaz tarafından üretilir.
MOSI: Master cihazdan yollanan verilerin çevresel cihazlara aktrıldığı hattır.
MISO: Çevresel cihazlardan (slave) yollanan verilerin master cihaza aktarıldığı hattır.
IRQ: İstenilen pinin işlevini sonlandırır. Siynaller RX/TX durumunda olduğu gibi alınır yada yollanır.
Özellikleri
1,9-3,6 voltaj beslemesi
Düşük güç tüketimi
Dünya çapında lisans gerektirmeyen 2.4GHz ISM band işletimi
Açık alanda 250 m haberleşme mesafesi
Boyutları:15×29 mm
Alıcı hassasiyeti<90dB
Verici sinyal gücü:+7dB
Uygulama Alanları
Eğitim amaçlı elektronik
Hobi elektroniği
HC-SR04 ULTASONİK MESAFE SENSÖRÜ
Ultrasonik ses dalgaları üreterek ,herhangi bir engelin algılanmasını ve buna göre işlem yapılmasını sağlayan bir modüldür. Ultrasonik ses dalgaları 20 kHz ile 500 kHz arasında frekanslara sahip ses dalgalarıdır. Bizim duyabildiğimiz 300 Hz-14000 Hz bandının üzerindedirler. Ultrasonik sensörler, ultrasonik ses dalgaları yayan ve bunların engellere çarpıp geri dönmesine kadar geçen süreyi hesaplayarak aradaki uzaklığı belirleyebilen sensörlerdir. Bu sensörlerde bu kadar yüksek frekanslarda ses dalgalarının yayılmasının nedeni ; bu frekanslardaki dalgaların düzgün doğrusal şekilde ilerlemeleri , enerjilerinin yüksek olması ve sert yüzeylerden kolayca yansımasıdır
JUMPER KABLOLAR
Bu bağlantı kabloları 2,54 mm’lik standart pinlere göre dizayn edilmiştir. Toplam 10 renk ve her renkten 4 adet olmak üzere toplam 40 adetlik paket halindedir. Bu 26 AWG’lik (American Wire Gauge / Amerikan Tel Ölçüsü) bağlantı kablolarının boyu 20 cm’dir. AWG’den bahsedecek olursak. AWG tel ölçü sistemine göre bir telin kalınlığı 0-40 numara arasında değişir; biz genelde en fazla 24-38 numara arası kalınlıktaki telleri kullanırız ki bu da mm cinsinden 0.5-0.1 arasına denk gelir. AWG ölçüsü arttıkça tel incelir, AWG ölçüsü azaldıkça tel kalınlaşır.
Arduino projelerinde sıklıkla kullanılan bu kablonun 3 farklı şekli vardır. Bunlar ;
Dişi-Dişi Jumper Kablo
Dişi-Erkek Jumper Kablo
Erkek-Erkek Jumper Kablo’dur.
LEDLER(KIRMIZI BEYAZ SARI)
LED ( Light Emitting Diode, Işık Yayan Diyot), yarı – iletken, diyot temelli, ışık yayan bir elektronik devre elemanıdır.
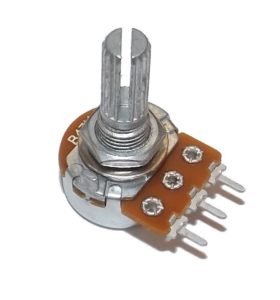
POTANSİYOMETRE
Potansiyometre, dışardan fiziksel müdehalelerle değeri değiştirilen dirençlerdir. Potansiyometrelerin daha güçlü daha yüksek akım değerine sahip olana reosta denir. Potansiyometreler daha çok karbon veya karbon içerikli direnç elemanlarından yapılır. Reosta ise krom-nikel direnç tellerinden yapılır.
TRANSİSTÖR
Transistör yan yana birleştirilmiş iki PN diyodundan oluşan, girişine uygulanan sinyali yükselterek akım ve gerilim kazancı sağlayan, gerektiğinde anahtarlama elemanı olarak kullanılan yarı iletken bir devre elemanıdır.
TRANSFORMATÖR
Genel olarak transformatörler bir elektrik devresinde voltaj veya akımı indirmek veya yükseltmek için kullanılır. Elektronikteyse esas olarak farklı devrelerdeki yükselticileri birleştirmek, doğru akım dalgalarını daha yüksek bir değerdeki alternatif akıma çevirmek ve sadece belirli frekansları iletmek için kullanılır.
DİRENÇ
Devre elemanı olan dirençte devrede akıma karşı bir zorluk göstererek akım sınırlaması yapar. Elektrik enerjisi direnç üzerinde ısıya dönüşerek harcanır.Direncin birimi ”Ohm” ‘dur. Ohm ‘un ast katları; pikoohm, nanoohm, mikroohm, miliohm, üst katları ise; kiloohm, megaohm ve gigaohm ‘dur.
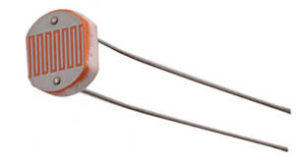
LDR
Optik sensör türleri içerisinde akıla gelen ilk elektronik elemandır. İngilizce Photo Resistor anlamına gelmesine karşın foto dirençler yaygın bir şekilde LDR adı ile ifade edilir. İsminden de anlaşılacağı üzere LDR, Light Dependet Resistance kelimelerinin kısaltılmış halidir. LDR, Ortamdaki ışığın şiddetine göre üzerine düşen direnç değerini ters orantılı olarak ayarlayabilen en basit optik sensör çeşididir.
BUZZER
Buzzer verilen voltaja göre farklı ses sinyalleri sağlayan bir cihazdır. Maliyetleri az , üretimi basit , ve çok hafif yapıda olmalarından dolayı kullanım alanı çok geniştir . – hırsız alarmları , araçlarda uyarı veren çoğu sistem ,bazı zil sesleri – Kısaca uyarı almak,korunmak, ayrım yapmak amaçlı her yerde kullanabiliriz. Devreli ve Devresiz olmak üzere 2 farklı tipi vardır. Biz projemizde devreli kullandık. Buzzer geniş alanlara sesi yayabilme amacı ile tasarlanmıştır . Siz isterseniz daha özel işlerinizde kullanabilirsiniz.
ARDUİNO KODLAMA AŞAMALARI
Projemizin kodlamasında ilk olarak servo kütüphanesini çağırdık.Kodumuz için 6 tane değişken belirledik(iki tane ultrasonik sensör, bir tane led,bir tane buzzer, süre ve mesafe için) Daha sonra bu alıcıların pin tiplerini belirledik.(alıcı ya da verici).Ardından void loop fonksiyonunu kullanarak for döngüsü ile servonun 0 dereceden 180 dereceye dönmesini sağladık. (İf else)komutuyla sensörümüzün karşısına bir cisim geldiğinde sensörün bunu algılayıp ledi yakıp buzzer ı çalmasını sağladık.
Aynı şekilde tekrardan bir for döngüsü yazarak servonun 180 dereceden 0 noktasına dönmesini sağladık.Aldığımız verileri hesaplayarak long ve int şeklinde processing programına ilettik. Daha sonra processing vasıtasıyla ultrasonik sensörün hedef tespit durumu anında hedefin bulunduğu konumu,mesafeyi ve açıyı grafiksel olarak görebiliriz. Ultrasonik sensörümüz normal şartlarda 4 metreye kadar ölçüm yapmasına karşın biz sensör menzilini 45 cm’ye sabitledik.