
, . Malzeme Listesi
Malzeme Listesi
2x10K potansiyometre,
2x10K trimpot,
2x BC547 TRANSİSTÖR,
2x LDR,2x LED,
2xBD140 TRANSİSTÖR,
4 LÜ PİL YATAĞI,
1 ADET SWITCH,
2x DC MOTOR,BAKIR PLAKET,
2x100ohm,2x220ohm,
2x1k ohm direnç kullanılmıştır.
İşlem Basamakları
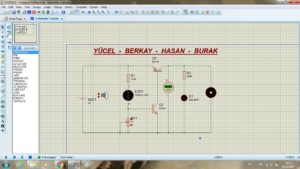
Devrenin şematiği ISIS de çizilerek motorun çalışıp çalışmadığı kontrol edilmiştir.
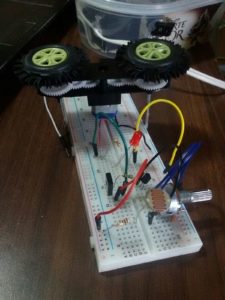
Daha sonra devrenin şematiğini breadboard üzerine kurarak, motorların çalışıp çalışmadığını test ettik.

LDR’in ışığa bağlı direncine bağlı olarak, motorların hızı ayarlanıyor ve bu durumu gösteren bir led yanıyor.
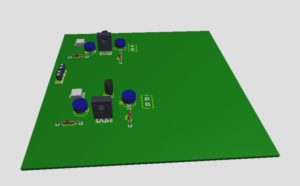
Her iki motorun çalıştığını breadboard üzerinde test ettikten sonra ,baskı devre için çizim yapmak üzere proteus programını kullanıp çizimi yaptık ve sonra bu çizimi bakır plaketin üzerine ütü yardımıyla mürekkebi aktardık.

Baskısını yaptığımız bakır plaketi asit-perhidrol işleminden (1/6 oranında) geçirdik.
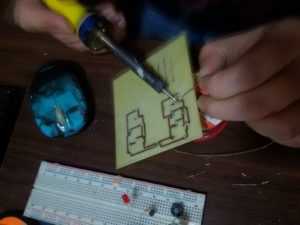
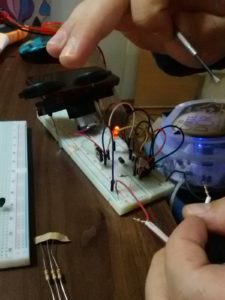
Baskı devre işlemleri bittikten sonra Malzemelerimizi lehimliyoruz.
Lehimleme işlemleri bittikten sonra,kalan montjı bitirmeden önce motorların çalışıp çalışmadığını tekrar kontrol ettik.

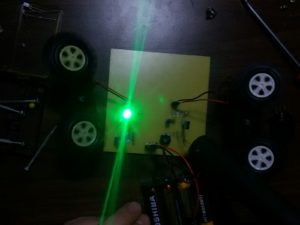
Tekerlerin ve motorların montajını da silikon yardımıyla yapıştırdıktan sonra robotumuz tamamlanmış oldu.(alttan görünüşü bu şekildedir)

Projemiz artık bitmiş bulunmaktadır,üstten görünüşü bu şekildedir,sorunsuz çalışmaktadır.Son olarak robota 1.5Volttan 4 adet pil bağladık.Her bir dc motor 3V ile beslenmektedir,ve robotu açıp kapatmak için switch kullandık.
Hazırlayanlar:
- YÜCEL YEŞİLTEPE
- BERKAY KIVANÇ
- HASAN KİRLİOĞLU
- BURAK BARKA