Merhaba Arkadaşlar,
Biz size Arduino kontrollü kendini dengeleyen robotumuzun yapımı için gerekli malzemeleri, yapım aşamalarını, bağlantı şemasını, gerekli arduino yazılımını ve çalışma mekanizmasını açıklayacağız.Umarım Projemizi anlatırken açıklayıcı olmuşuzdur çünkü biz örnek projelere bakarken yapım aşamaları çok dağınık verildiği için bir sürü farklı siteden yardım almaya çalıştık.
Sizlere ilk olarak projemiz için gerekli malzemeleri belirtmek isterim.
- Arduino(Uno veya Nano) Biz Uno kullanmayı tercih ettik elimizde önceden bulunduğu için.
- MPU6050 ivme sensörü
- L298N motor sürücüsü
- 2’şer tane DC motorlu tekerlek
- Kaba taslağı için gerekli dikdörtgen levha biz ince tahta bir kontraplak seçtik siz isterseniz sert plastik veya pleksi kullanabilirsiniz.Ama üzerindeki malzemeleri taşıyabilecek kalınlıkta olmalıdır.(20×8 cm uzunluğunda 3 adet). Boyutları küçültebilirsiniz çünkü proje tamamlandığı zaman dengede durarken biraz zorlanmıştı boyutları büyük olduğu için.
- Projenin iskeletini ayakta tutacak demir çubuklar.(20’şer cm’lik 4 adet).Ve sabit durmasını sağlayan 24 adet somun gereklidir.
- Erkek-erkek ve erkek-dişi jumper kablolar
- 9V’luk bir pil ve 1.5V’luk 4 adet kalem pil + 4’lü kalem pil yuvası
Malzememizi de tamamladığımıza göre projemizin yapım aşamasına geçebiliriz.
1-Biz projemizin orjinal ve düzenli gözükmesi için projemizin iskeleti için bir marangozdan yardım almak istedik ince ve sert bir kontraplak kullanığımız için ama sizler bunu evde de rahatlıkla yapabilirsiniz seçtiğiniz malzemeye göre iskeletinin yapımı değişir sadece.
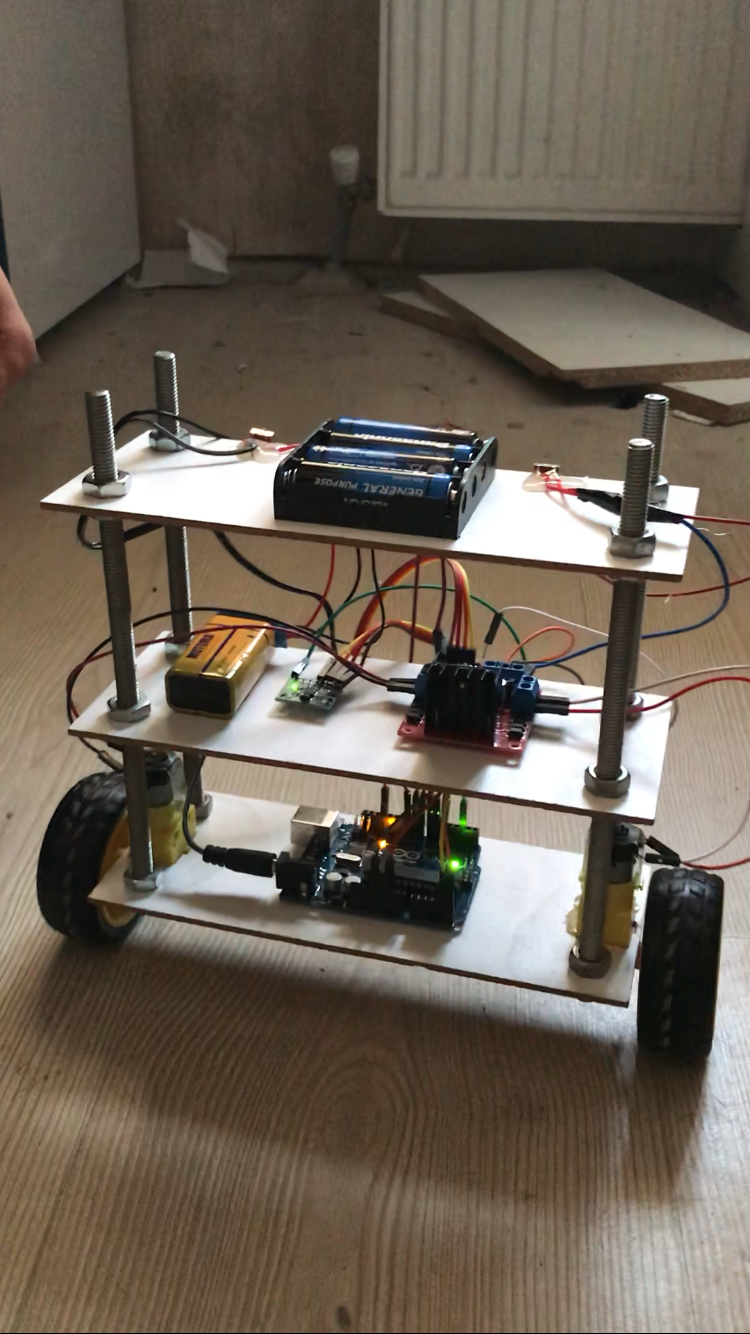
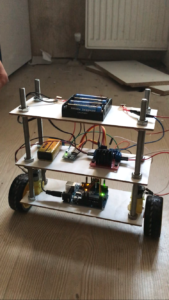
 Yandaki şekilde gördüğünüz üzere robotumuzun iskeleti hazırdır katlar arası 8’er cm’lik açıklık bıraktık zaten kartlarımız ve jumper kablolarımızın sığması için bu aralık yeterince idealdir.
Yandaki şekilde gördüğünüz üzere robotumuzun iskeleti hazırdır katlar arası 8’er cm’lik açıklık bıraktık zaten kartlarımız ve jumper kablolarımızın sığması için bu aralık yeterince idealdir.
2-İlk olarak projenin iskeletini tamamlamayı amaçladığımız için ikinci aşama olarak dc motorlu tekerlekleri iskelete monte ettik.Vidalar kenara çok yakın olduğu için yan bir şekilde monte edemedik biz de aşağıdaki şekilde gördüğünüz üzere köşelerine tam tekerleklerin sığabileceği şekilde delik açtık daha sonrada bunların sağlam ve aynı hizada durması için hızlı yapıştırıcıyla dik bir şekilde sabitledik.


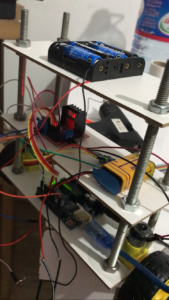
3-Projemizin çalışması için gereken bağlantıları kurma.Aşağıdaki resimlerde görüldüğü gibi ivme sensörünü ile uno kartın, uno kart ile motor sürücüsünün, tekerlekleri döndürmesi için gerekli kabloların bağlanması, 9V’luk pilin uno karta, 1.5V’luk 4 pilin de tekerleklere olan bağlantısını tamamlıyoruz.Bazı jumperlar tam olarak sabit kalmadığı için örneğin sensörü uno karta bağlarken bu kabloları sensöre lehimliyoruz.Lehim yaparken dikkatli olmalıyız çünkü lehimler arasında en ufak temas projemizin çalışmamasına sebep olacaktır.
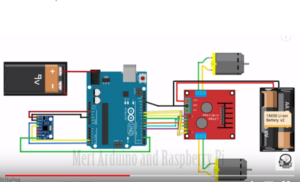
Şematik olarak yukarıda gördüğünüz devreyi aynı şekilde kurarsanız hiçbir sorunla karşılaşmazsınız.
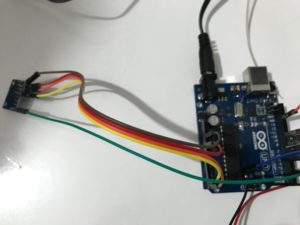

ivme sensörünün uno karta bağlantıları yapılır.

(Uno kart ile motor sürücü kartın bağlantıları yapılır. (Arduino karttan ivme sensörüne gelen jumperlar lehimlenir.)
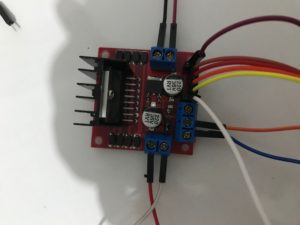
Motor sürücü kartının dc motorlu tekerleğe bağlantıları yapılır.)
4-Bağlantılarımızı yaptıktan sonra iskelete kartları silikonluyoruz.En alt kata arduino uno kartı, orta kata 9V’luk pil motor sürücü kartı ve ivme sensörünü, en üst kata da 4’lü pil yuvasını ve pilleri yerleştiriyoruz ağırlık çok önemli olduğu için de pilleri tam ortaya yerleştiriyoruz.


Kartlar silikon yardımıyla iskelete sabitlenir.
Açma kapama butonu ekleriz ve projenin yapım aşaması biter.
5-Son olarak projenin dengede durması için yazılım kısmını hallediyoruz.Aşağıdaki linke tıklayarak arduino kodlarına ulaşabilirsiniz.
ASA-KOD-Dengede-Kalan-robot.ino
6- Son olarak kodları yükledikten sonra robotumuzun nasıl çalıştığını ve dengede durduğunu youtube linkinden izleyebilirsiniz.
GRUP653
- Fatma Şavkar (2013010219009)
- Betül Yanık (2013010219032)
- Büşra Deniz Selimhan (2014010219053)
- Şüheda Şahin ( 2014010220083)