
Kullandığımız Malzemeler:
- Arduino kartımız
- 2 tane dc motor ve tekerlek
- L293d motor sürücü
- Hc-Sr04 ultrasonik mesafe sensörü
- Sarhoş tekerlek
- Orta boy breadbord
- Plaket
- Bağlantı kabloları
- 2 tane 9v pil ve pil başlığı
Kullanılan Devre Şeması:
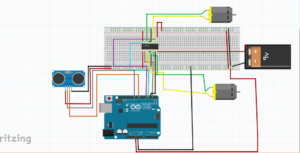
Devreyi breadboard da kurmadan önce anlamamız ve kolaylık sağlaması için Fritzing programında çizdik.
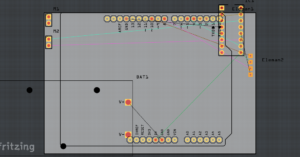
Devrenin baskı devre şemasını Fritzing programında çizdik.
Gerekli kontrolleri yaptık ve aşağıdaki kodu yükledik.
const int trig = 10; //sensör pinleri tanımlandı
const int echo = 8;
const int sol_i = 2; // motor sürücü pinleri tanımlandı
const int sol_g = 3;
const int sag_i = 4;
const int sag_g = 5;
int sure = 0; // mesafe hesabından kullanılacak olan değişkenler tanımladı
int mesafe = 0;
void setup()
{
pinMode(trig , OUTPUT); // sensörün trigger pini çıkış olarak ayarlandı
pinMode(echo , INPUT ); // sensörün echo pini giriş olarak ayarlandı
pinMode(sol_i, OUTPUT); // motor sürücü pinleri çıkış olarak ayarlandı
pinMode(sol_g, OUTPUT);
pinMode(sag_i, OUTPUT);
pinMode(sag_g, OUTPUT);
}
void loop()
{
digitalWrite(trig , HIGH); // hc-sr04 kullanılarak mesafe hesaplandı
delayMicroseconds(1000); // mesafe hesabının ayrıntıları için videoya bakınız
digitalWrite(trig , LOW); //
sure = pulseIn(echo , HIGH);
mesafe = (sure / 2) / 28.5;
if (mesafe < 30 ) // mesafe 30cm den küçük ise robotu geri al ve döndür
{
digitalWrite(sol_i , LOW);
digitalWrite(sol_g , HIGH);
digitalWrite(sag_i , LOW);
digitalWrite(sag_g , HIGH);
delay(150);
digitalWrite(sol_i , LOW);
digitalWrite(sol_g , HIGH);
digitalWrite(sag_i , HIGH);
digitalWrite(sag_g , LOW);
delay(250);
}
else // mesafe 30cm den büyük ise düz git
{
digitalWrite(sol_i , HIGH);
digitalWrite(sol_g , LOW);
digitalWrite(sag_i , HIGH);
digitalWrite(sag_g , LOW);
}
}