ROBOT EL
1-Arduino ile kodlama (Kaan KESEMEN):
Projemizde flex sensörlerden aldığımız analog sinyalleri, servo motorları ihtiyacımız olan şekilde çalıştıracak sinyallere dönüştürebilmek için Arduino UNO R3 geliştirme kartını kullandık.
Her bir flex sensörden çıkan iki kablodan birine 5V verdik, diğer kabloyu ise Arduino’nun analog sinyalleri alacağı pin’e(ilk parmak için A0, ikinci parmak için A1 …) bağladık ve sensörün üzerinden akım geçmesi için pin’ide 47k ohm dirençle birlikte topraklama kısmına bağladık.47k ohm direnç kullanmamızın nedeni sensörün üzerinde bizim ihtiyacımız olan değerde gerilim yaratabilmekti. Servo motorlardan çıkan 3 kablodan birine 5V verdik, diğerini de toprakladık, Arduino sayesinde sensörlerden alınan ve kodlama sayesinde ihtiyaç olunan değerlere dönüştürülen analog sinyalleri Servo motorlara iletilmek üzere 7-3. pinlerden çıkarttık ve Servo motorların sinyalleri alacağı kabloları bu pinlere bağladık.
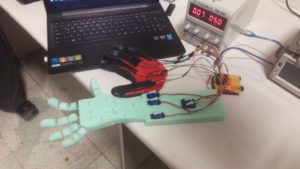
Aşağıdaki fotoğrafta bir Servo motor ve bir Flex sensör yukarıda anlatıldığı gibi bağlanmıştır;
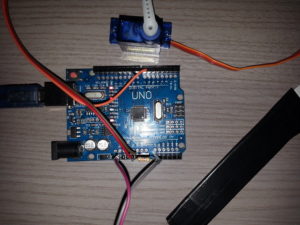
Flex sensörden çıkan mor kablo 5V ‘a, gri kablo ise A0 pin’ine bağlanmıştır. A0 pin’ide 47k ohm dirençle birlikte GND ‘ye bağlanmıştır.Servo motordan çıkan kırmızı kablo 5V ‘a, kahverengi kablo GND ‘ye, turuncu kablo ise 7. pin’e bağlanmıştır.
Arduino ‘nun kodlanması ise aşağıdaki gibidir;

” #include <Servo.h> ” komutuyla Servo motorlarla ilgili kodları yazabilmek için Servo kütüphanesini yüklüyoruz.
” Servo myservo1 ” komutuyla myservo1 isminde bir Servo motor tanıtmış oluyoruz.
” void setup() ” kodu altında kurulum kodlarımızı yazıyoruz.
” Serial.begin(9600) ” komutu herhangi bir Flex sensörden alınan analog sinyallerin değerlerini seri iletişim yaparak aşağıdaki fotoğraftaki gibi saniyede 9600 bit hızla görmemize olanak sağlıyor.
” myservo1.attach(7) ” komutu oluşturduğumuz myservo1 ismindeki Servo motora gidecek olan sinyali Arduino ‘nun 7. pin ‘in den çıkartmamıza yarıyor.
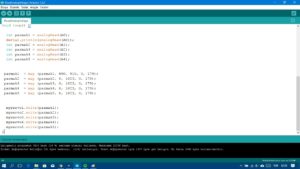
” void loop() ” kodu altında döngü komutlarımızı yazıyoruz.
” Serial.println(analogRead(A0)) ” komutu seri iletişimde gösterilen sinyal değerlerinin hangi pin ‘den geleceğini seçmemize yarıyor.
” int parmak1 = analogRead(A0) ” komutuyla Arduino ‘nun A0 pin ‘inden alınan analog sinyali parmak1 olarak isimlendiriyoruz. İnteger yani int komutu kullanmamızın sebebi A0 pin ‘ine gelecek olan sinyalin 0 ve 1023 değerleri arasında olacak olmasından kaynaklanıyor.
” parmak1 = map (parmak1, 690, 910, 0, 179) ” komutu sayesinde aldığımız analog sinyal değerlerini bizim ihtiyacımız olan yani Servo motora gidecek olan analog sinyal değerlerine dönüştürüyoruz.Parmak1 ‘den aldığımız minimum değer 690 ve maksimum değer 910 fakat Servo motor 0-179 derece aralığında dönebildiği için 690 değerini 0 olarak, 910 değerini 179 olarak alıyoruz ve 690-910 arasındaki değerlerin aynı orantıyla 0-179 arasında bir değere dönüşmesini sağlıyoruz.
” myservo1.write(parmak1) ” komutuyla parmak1 ‘i ve myservo1 ‘i ilişkilendiriyoruz.Böylece parmak1 diye isimlendirdiğimiz ve A0 pin ‘ine bağlı olan Flex sensörden gelen analog sinyalin istenilen değerlere dönüştürüldükten sonra myservo1 diye isimlendirdiğimiz Arduino ‘nun 7. pin ‘ine bağlı olan Servo motora ulaştırılmasını sağlıyoruz.
– Baskı Devre Yapımı:
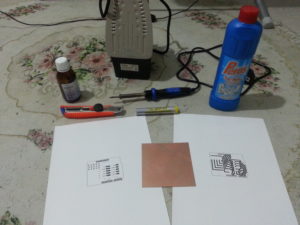
Baskı devrede kullandığımız malzemeler aşağıdaki fotoğrafta da görüldüğü gibi;
- 1 adet bakır plaka
- devrenin altının ve üstünün resminin basılmış olduğu parlak A4 kuşe kağıt çıktılar
- 1 adet maket bıçağı
- 1 adet ütü
- 1 su bardağı tuz ruhu
- 1 çay bardağı oksijenli su
- havya ve lehim
- eritme ve durulama için kap
- bant
Bakır plakaya basacağımız devre şemasını Proteus 8 Professional programını kullanarak çizdik.
Baskı devrenin şeması aşağıdaki gibidir;
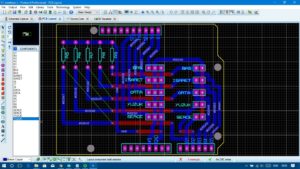
Mavi çizgiler baskı devrenin alt kısmında iletkenliği sağlayacak olan bakırı göstermektedir.
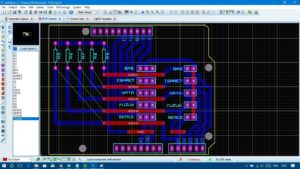
Kırmızı çizgiler ise baskı devrenin üst kısmında yer alan uç noktalarından iletkenliği sağlamakla görevli olan ve yine uç kısımlarından baskı devrenin alt kısmıyla da temasta olan bakır telleri göstermektedir.
Parlak A4 kuşe kağıtlara aldığımız çıktılardaki tonerli kısımları bakır plakaya geçirebilmek için ilk önce bakır plakayı yaklaşık 2-3 dakka ütüyle ısıttık. Ardından çıktıları, tonerli kısımları bakır plakaya temas edecek şekilde bakır plakaya bantladık ve ütüyle üzerinden geçerek tonerli kısmın kağıdı bırakıp bakır plakaya geçmesini sağladık.Bu üzerinden geçerek ısıtma işlemini tonerler bakır plakaya geçinceye kadar sürdürdük.Ara ara toner bakır plakaya geçmişmi diye kontrol ettik. Elimiz yanmasın diye kontrol etme yani bantı çıkarıp kağıtla bakır plakanın arasına bakma işlemini makas yardımıyla yaptık.

Toneri bakır plakanın üstüne geçirmemizin nedeni bakır plakayı asite attıktan sonra tonerin altında kalan bakır kısmın toner olmayan kısımlardan daha geç erimesine sebep olacak olması.Böylece üzerinde toner olmayan kısımlardaki bakır yeterince eriyip yok olduktan sonra plakamızda sadece üzerinde önceden toner olan bakır kısımlar kalacak ve istediğimiz iletken yollar oluşmuş olacak.
Eritme işlemini aşağıdaki fotoğraflarda gördüğünüz gibi bakır plakayı 1 çay bardağı oksijenli su ve 1 su bardağı tuz ruhu karışımının içine atarak yaptık;
1.aşama:

2.aşama

3.aşama:

Toner olmayan kısımlardaki bakırlar iyice yok olduktan sonra plakamızı asitten çıkardık.
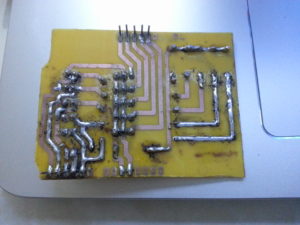
Plakamızı maket bıçağı kullanarak ihtiyacımız olan boyutlarda kestik, açılması gereken delikleri açmak için üniversitemizde bulunan plaka delme aletini kullandık.Dirençleri, pin ‘leri ve bakır telleri plakamıza lehimledik ve baskı devreyi bitirmiş olduk.

Baskı devrenin bakır kısmında deformasyona uğrayan yerlere aşağıdaki fotoğraftaki gibi lehimle yama yaptık.
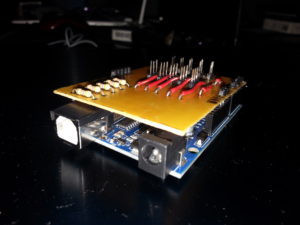
Baskı devremizin Arduino ‘ya takılmış hali aşağıdaki gibidir;
2)Songül ATEŞ(El Kısmı)
El Kısmı için Malzemeler:Strafor,maket bıçağı,silikon tabancası,lastik,kaba zımpara kağıdı,misina(balık ipi),çöp şiş.
Yapımı:Elin parmak ölçülerine göre strafor kesilir.Zımpara kagıdı ile strafora parmak şekli verilir.Şekillendirilen parmakların içinden çöp şiş geçirilerek misina ipi için bir kanal oluşturulur.Misina ipi parmaklardan geçirilir.Elin geri kalan kısmı(avuç içi ve kol) parmaklarla birleştirilir.misina ipi servo motorlara bağlanır.






3)Sema KÜÇÜK(Servo Motorların yerleştirilmesi)
Yapımı:Strafor ele herbir parmak için servo motorları videoda görüldüğü gibi yerleştirdik. Daha sonra servoların kablolarını baskı devre üzerinde bulunan ilgili pinlere yerleştirdik.
Mert ÇETİNKOL (Flex sensörler ve eldiven yapımı)
Malzemeler : Siyah bant, jumper, asetat kağıdı, kurşun kalem, kağıt, alüminyum folyo, eldiven, zımba, makas
Flex sensörlerin yapımı
Bir beyaz kağıt kurşun kalemle tamamen boşluk kalmayacak şekilde boyanır. Ortalama bir parmak uzunluğu bizim için birim uzunluktur. Bütün kesme işlemlerin boyuna uzunluğu bu boyutta olmalıdır. Kesilen bir bant üzerine erkek uçları uçları soyulmuş jumperlar bantın ucundan yapıştırılır. Kabloların üzerine ortalarında ince bir aralık kalacak şekilde iki parça olarak alüminyum folyo yapıştırılır.


Aynı bu boyuttaki bantın üzerine kurşun kalemle karalanan ve aynı boyutta kesilmiş kağıt yapıştırılır. Elimizdeki bu iki bant yüz yüze gelecek şekilde yapıştırılır. Aynı boyutta kesilen iki parça asetat kağıdı birim uzunluğumuzun iki katı kesilmiş bantın üzerine yine aralarında çok ince bir aralık bırakılarak yapıştırılır. Asetat kağıtlı bantları hazırlamış olduğumuz kablolu parçanın üzerine kaplayarak tekrar sabitlemek için bantlanır. Bu işlem yapılacak olan 5 parmağın her biri için bir tane olmak üzere yapılır.
Her bir sensörün hassasiyet aralığı Kaan’ın arduino ile kodlama bölümünde gördüğümüz gibi arduino programı üzerinden gözlemlenir ve kod üzerinde verimli hale gelmesi için açık ve kapalı durumları yazılır.
Yapmış olduğumuz flex sensörler bir eldivenin parmakları üzerine zımbalanır.
– Projenin Son Hali