H bridge ile çift yönlü kontrol edilen motoru, SPI protokolü ile NRF24L01 ile kablosuz olarak birbirine bağlı iki adet pic ile birini kumanda olarak diğerinide sürücü olarak kullanıp kablosuz olarak sürdük.
I designed H bridge to drive motors, two drections. There are two PIC to can control motor wirelessly. One of them is for drive motor and other one is to send commands wrilessly. I used SPI protocol to send datas via NRF24L01. NRF uses wireless system as bluetooth unless some kind protocols.


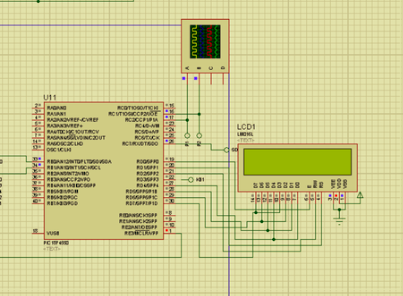
Şekilde SPI bağlantısını test için iki işlemciyi birbirine bağlayıp yazılımları yükleyip test ettik. Tüm testler tamamlandıktan sonra devreyi basılacak bir hale getirip tasarlamaya başladık.
Firstly we need to test software. So I uploaded my software to PIC wich is simulated on Proteus. When everyting is ok, than I started to design circuits for pcb.
Motor sürücü devresi / Motor Driver Circuit:

Baskı devresi / PCB:

Kumanda devresi / Remote Circuit:

Kumanda baskı devresi / PCB:

KODLAR:
MOTOR SURUCU / Motor Driver Codes: http://codepad.org/zUSApB0b
KUMANDA / Remote Codes: http://codepad.org/AZOtoEEq