AMAÇ
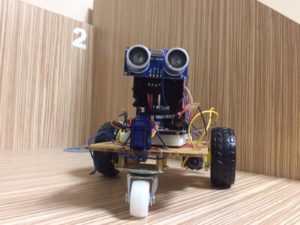
Engelden kaçan robot (araba) arduino uno’unu içine attığımız program ile hareket ettiğinde önünde (Ultrasonik Mesafe Sensörü) ile bir cisim algıladığında belli bir mesafe sağladığında sağına, soluna veya geriye dönerek ilerler.
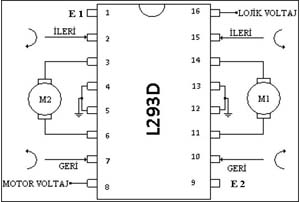
L293D ve L293B Motor Sürücü Entegreleri

L293D ve L293B motor sürücü entegreleri içlerinde iki adet H köprüsü barındıran 16 bacaklı motor sürücü entegrelerdir. Genellikle DC motor kontrolünde tercih edilen motor sürücü entegreler olan L293D ve L293B ile iki motor birbirinden bağımsız olarak çift yönlü kontrol edilebilmektedir. Ayrıca L293 motor sürücü entegrelerin enable bacaklarının kullanılmasıyla PWM kontrolü de yapılabilmektedir.
L293D motor sürücü entegresi 4,5 V ile 36 V aralığında maksimum 600 mA akım sınırına kadar kullanılabilir. L293B motor sürücü entegrenin ise aynı voltaj aralığında, maksimum 1 A akım sınırına kadar kullanılması mümkündür.
HC-SR04 Sensörü


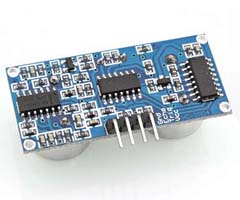
1) Mesafe ölçümü için ve robot projelerinde kullanılabilir.
2) Arduino devreleri ile kullanılabilir.
3) 2 cm ile 400 cm arasınde mesafe ölçümü yapabilir.
4) Ölçüm hassasiyeti 3 mm dir.
MALZEMELER
1- Arduino Uno

2- 6V Redüktörlü DC motor + Tekerlek
3- L293B Motor Sürücü
4- Hc-Sr04 Ultrasonik Mesafe Sensörü
5- Sarhoş Tekerlek
6- Ortaboy Breadbord
7- Çeşitli Vida ve Somunlar
8- 12×12 cm Pertinaks ya da Bakır Plaket
9- 4 Adet Kablo bağı
10- 9V pil + Pil başlığı
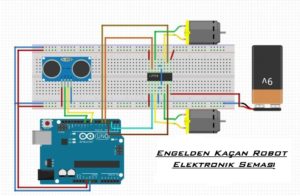
ELEKTRONİK ŞEMASI
YAPIM AŞAMASI
1) Pertinaks üzerine L293d motor sürücüsünü yerleştriyoruz.

2) L293d motor sürücüsü Pertinaksa lehim yapıyoruz.
3) Jumper kablolar ile devreyi kuruyoruz.
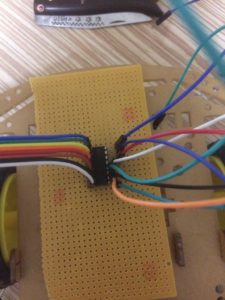
4) Jumper kablolarla kurduğumuz devreyi Pertinaks üzerine lehimliyoruz.

5) Arduino Uno ile L293d motor sürücüsünü jumper kablolar yardımıyla devreyi tamamlıyoruz.

6) Ve Arduino Uno’ya program atıyoruz.
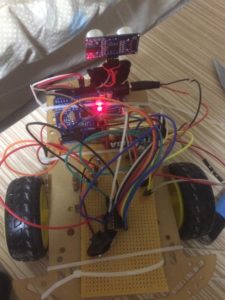
7) Robotumuzun son halidir.

ARDUINO UNO KODU